特斯拉的自动驾驶技术进步显著。起初,它只是从基础技术起步,现在却已达到行业前沿。这一成长历程中,不仅彰显了创新与突破的成就,也吸引了大量消费者和科技发烧友的目光。
特斯拉架构升级Occupancy Network


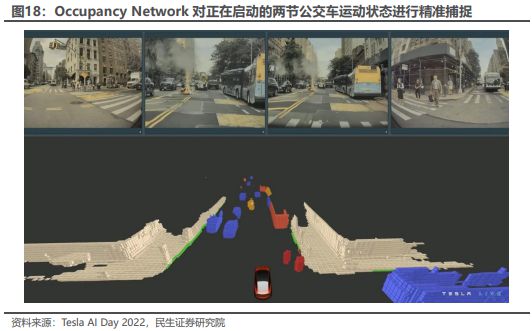
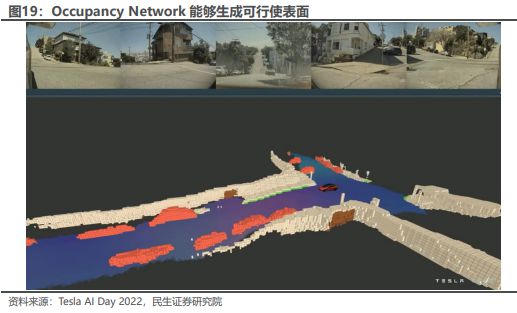
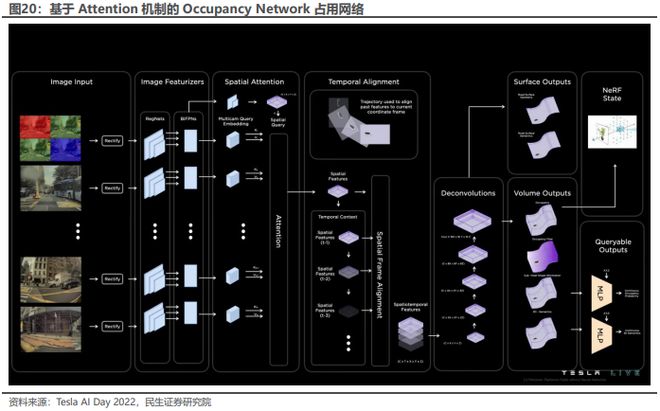
特斯拉升级至Occupancy Network架构意义重大。这种升级可直接在向量空间生成体积占用信息。举例来说,在道路测试时,它能明显区分不同车辆的体积,精确评估行人和其他移动物体的运动状态差异。这一特性让车辆能更精准地应对周边环境。相较于以往技术,它在物体识别和动态判断方面有了显著进步。同时,这也利于降低交通事故的发生率,提高自动驾驶车辆的安全性。
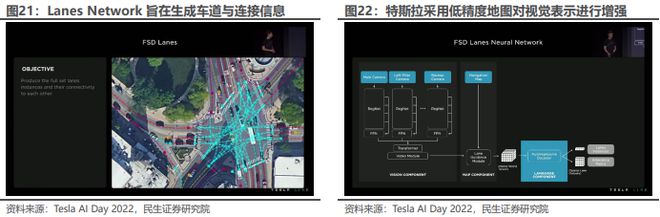
交互搜索框架用于轨迹研究
特斯拉的自动驾驶技术中,交互搜索框架扮演着关键角色。这个框架通过将任务分解,对众多可能的行驶路径进行了深入研究。实验表明,在多弯的道路上,它能够即时评估行驶策略。同时,它还能对各种道路状况进行合理分析。即便是在复杂的城市道路,比如狭窄的街道和多个岔路口,它也能协助车辆挑选出恰当的行驶路径,保证车辆行驶的平稳性。
综合训练数据集的形成
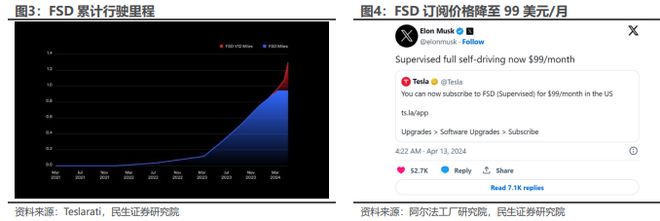
特斯拉打造了一个内容繁多的综合训练数据集。这个数据集融合了实际数据、标注信息,还有经过模拟和人工校准的数据。借助这些资料,特斯拉建立了一个庞大的数据库。在车辆测试环节,他们搜集了来自美国加州和中国上海等地的数据。这些数据被用于训练车载在线模型,涵盖了车道线识别、障碍物探测等功能。通过这种方法,特斯拉不断优化其自动驾驶系统。这个数据集对特斯拉自动驾驶技术的持续发展至关重要。
V12端到端自动驾驶系统
V12是首个实现全程自动驾驶的系统。它能模仿人类的驾驶动作。在常规驾驶环境中,V12的表现与人类驾驶员无异,能进行感知和做出决策。在一次内部测试中,V12展示了其在应对紧急情况时的出色表现。与以往自动驾驶系统相比,V12的反应更加迅速,驾驶风格也更贴近人类。这一系统显著提升了特斯拉汽车的自动驾驶水平。

硬件资源与AI编译器优化
特斯拉提升了其硬件和AI编译器的效能,这进而增强了整体的计算水平。经过优化的硬件资源,有效满足了神经网络进行新操作的需求。以特斯拉某款车为例,经过优化后,其执行复杂神经网络计算的速度提升了约30%。此外,这些优化被应用于最适宜的硬件,确保了汽车在行驶中人工智能计算的效率。
多技术提升自动驾驶能力
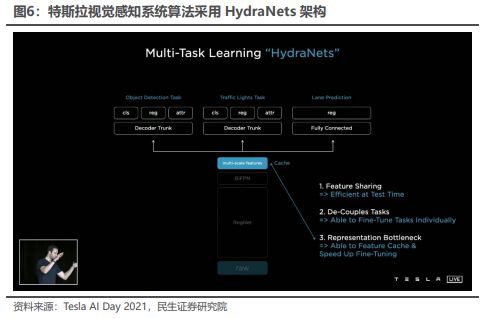
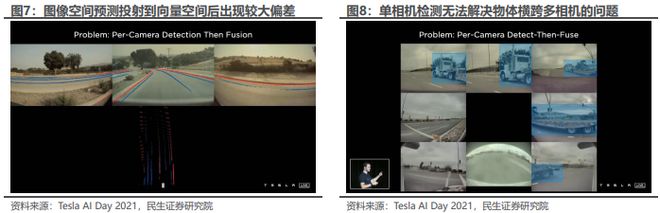
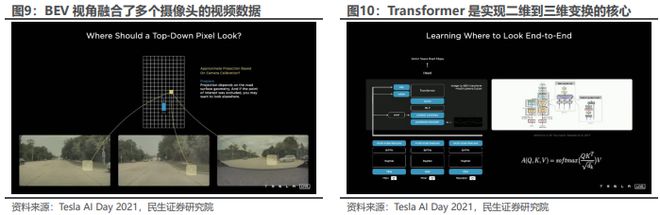
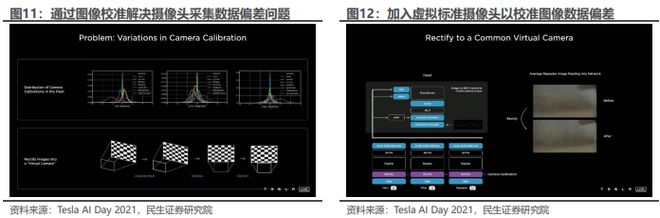
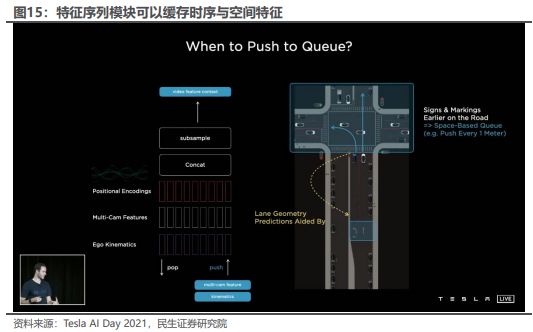
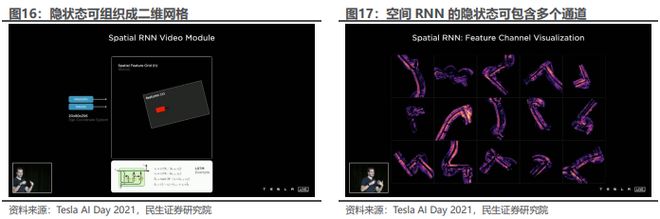
特斯拉运用多种技术提升了自动驾驶的水平。比如,BiFPNs双向特征金字塔网络提升了多尺度目标的辨识力。在路况复杂多变的情况下,不同尺度的信息可以顺畅交流与共享,从而精确地识别出各种大小的物体。此外,特斯拉还采用了前融合技术,将多个摄像头的影像资料合并,并通过同一神经网络进行训练。这样一来,二维图像便转化成了三维向量。在引入BEV+Transformer之后,尽管感知网络还存在一些不足,但特斯拉通过这些技术,使得自动驾驶变得更加安全与高效。
特斯拉在自动驾驶领域持续取得创新,其技术已在实际使用中得到了不断验证。您觉得特斯拉能否引领未来自动驾驶汽车行业的发展?